DRIVESIM 解析事例 [ホームへ]
−EVはトランスミッションを必要としない?-
<EVはトランスミッション不要という説の根拠は?>
EVではトランスミッションは不要となり部品点数削減が可能といわれています。 元々エンジン車においてトランスミッションを設ける目的はエンジンの低速トルクは低くしたがって発進時や加速時に
大きな駆動力を得るためにエンジン:駆動輪の回転数比を大きくして駆動トルクを大きくすることであり、これに対しモータは低速トルクが大きく発進時に大きな駆動力が得られるのでトランスミッションは
不要というのが根拠です。
因みに新幹線はトランスミッションなしで300km/h以上の最高速を達成しておりこれから類推しても最高速200km/h以下のEVにトランスミッションは不要という説得力のある(?)解説を見かけたことがあります.
<DRIVESIMによる検証_>
■トランスミッションなしでエンジン車並みの走行性能を得るために要求されるモータ性能は?
例えば下図はDRIVESIMで描いた5速MT車の走行性能線図ですがこれと同じ駆動力をトランスミッションを用いずにモータのみで得ようとすると赤線で示す特性のモータが必要となります。
最大駆動力は車速0-40km/hまで一定でそれより高速域では最高速180km/hまで駆動力は車速に対しほぼ反比例して低下しています。これはその範囲で動力(出力)が
一定であることを意味します。車速40km/hにおけるモータ回転数が基底回転数であり180km/hにおけるモータ回転数が最高回転数であり可変速比R=最高回転数/基底回転数=4.5となります。
モータにとってこのRの値は重要であり、実はモータにとって良好な効率を保ちながらRを大きくすることは易しいことではありません。
これに対し大出力のモータを搭載すればRの大きさは問題と
なりませんがそれでは小型軽量で低空気抵抗というEVのセールスポイントに反します。
----------------------------------------------------------------------------------------------------------------------------------------
先の新幹線の話しですが電車と自動車とでは要求加速度や走行する路面の最大勾配などの条件が全く異なる(勿論自動車が格段に大きい)ことが考慮されていません。
----------------------------------------------------------------------------------------------------------------------------------------
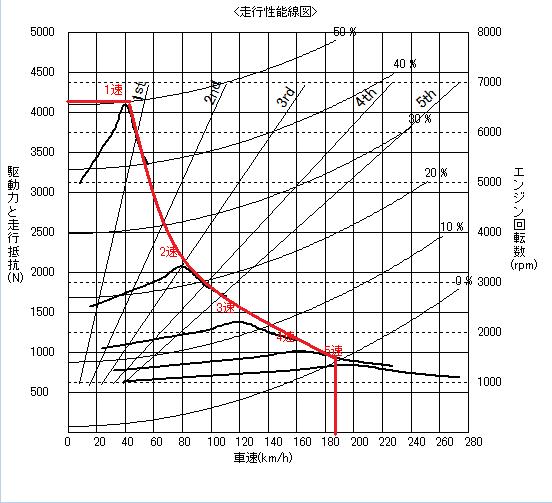
図―1 エンジン車とEVの走行性能線図
■モータの速度特性と界磁弱め制御
EVに多く用いられるブラシレスDCモータ(永久磁石式同期モータとも称する)またはDCモータはモータの印加電圧を変えて速度Nを制御します。 図−2はブラシレスDCモータのトルクー回転数特性(T-N特性)を示します。
低速では界磁F一定で印加電圧Vを変化させて速度Nを制御し、Vが大きいほど速度Nは大きくなりますがモータのドライバ回路で発生させることが出来る電圧には上限があります。例えば図で最大電圧96V
とするとT-N線よりモータの最大回転数Nmaxは約3600rpmとなります。一方モータの許容電流から決まる最大トルクTmaxを214Nmとすると電圧96Vの条件でトルクがTmaxとなる回転数NはT-N線より2000rpmとなります。
この時基底回転数Nbaseは2000rpm, 最大回転数Nmaxは3600rpmということになりR=3600/2000=1.8となります。図―1の走行性能線図で示すようにR=1.8では車速ゼロから最高速までをカバーできないのでNmaxを上げる
必要があります。Nmaxを上げるには電圧を上げるという方法が考えられますがドライバの出力電圧を上げるのは容易ではありません。
そこで用いられるのが界磁弱め制御という方法です。永久磁石式同期モータはベクトル制御により界磁電流とトルク電流を自在に制御できますが基底回転数以下の速度では同一電流で最大トルク・効率が得られるよう制御します。
この時モータのトルク定数KTと逆起電力定数KVは一定でありT-N線の傾きは一定となります。一方基底回転数以上の速度では界磁を弱めるよう界磁電流の制御を行います。界磁を弱めると同じ電流に対し発生するトルクが小さくなり
モータのトルク定数KTと逆起電力定数KVが小さくなります。図―2に界磁を弱めたときのT-N線を示します。界磁を弱めるほどT-N線は’寝てくる‘ので最大回転数は上がります。またこの時T-N線群によって描かれる包絡線が高速における
Tmaxの曲線となりいうまでもなくTmaxはNに反比例するのでモータ出力は一定となります。このように界磁弱めによりモータ回転数を上げることができることは分かりましたが余計な界磁電流を流すことからモータ効率が低下することは容易に
推測できます。
最近、ネオジム永久磁石の作る強力な磁界により高トルクを得る永久磁石式同期モータの出現はEVの性能を飛躍的に向上させました。しかし一方で強力な磁界はロータ(回転子)回転に伴い大きな逆起電力を生むので回転数を上げる
ためにはモータに高い電圧を印加しなければなりません。 ただ前述のように駆動回路の出力電圧には限界があります。したがって「高トルク」とはいえ実際に高トルクで運転できるのは低速においてのみであり高速域では界磁弱め制御によりトルクと
効率を低下させざるないという矛盾を抱えています。
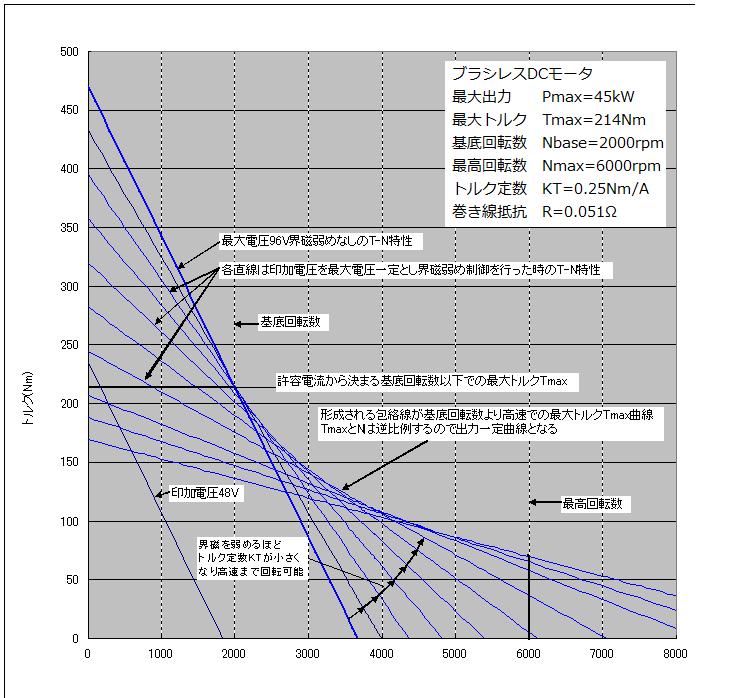
図―2 ブラシレスDCモータの界磁弱め制御
■界磁弱め制御によるモータ効率低下の問題
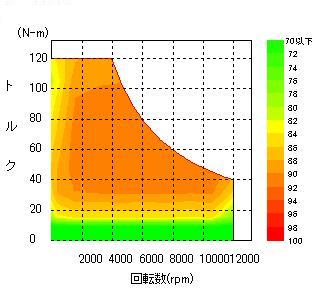
図―3はDRIVESIMにより基底回転数が4000rpmのモータの界磁制御を行った場合のモータ効率マップを示し、図―4は界磁弱め制御を行わずに高速まで運転する仮想制御を行った場合のマップを示します。 仮想制御では
モータ印加電圧に上限がなく4000rpm以上も界磁を弱めずに電圧を上げ続けることができるものと仮定しています。 図から明らかなように高速で界磁弱め制御を行う場合、それを行わない場合に比べモータ効率が低下し、特に
高速、高負荷における効率低下が大きくなります。このようにブラシレスDCモータ(永久磁石式同期モータ:PMSM)では低速での高トルク化と高速での高効率化は背反問題として克服しなければならない大きな技術課題となっており
現在も研究が続けられています。
高速高負荷域でのモータ効率低下がもたらす問題は2つあり、1つは航続距離の問題です。高速高負荷域で効率が低下すると高速道路や登坂路走行時に航続距離が短くなります。もう1つはモータの熱問題です。
例えば効率が90%から80%に低下すると効率の相対比は約0.9程度ですが損失は10:20であり相対比は2倍になります。損失は熱に変わるので高出力側で損失が大きいとモータの過熱が問題となります。
通常モータはその温度が許容範囲を超えない範囲で使用するよう出力が制限されています。多くのモータでは連続定格出力(連続して出力し続けることが可能な値)と短時間定格出力(許容時間のみ出力可能)が設定されており
EV用モータでは1分定格値(許容時間1分)を用いることが多いようですがカタログ値によると連続定格出力は1分定格値の1/3程度です。 高出力域のモータ効率が下がると1分定格出力(EVにとっての最大出力)も下がるので
目標の走行性能を得るためにより大きな出力のモータが必要になります。
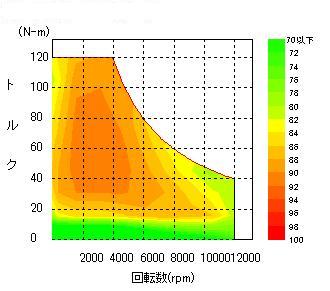
図―3 モータ効率マップ_界磁弱め制御あり
図―4 モータ効率マップ_界磁弱め制御なし
■検証結果のまとめ
EVという車両システムにおいてよりすぐれた走行性能、省エネ性、低コストを達成するためのモータ・トランスミッションを含めた駆動系(ドライブトレイン)コンセプトの検証は重要です。
モータ技術およびその制御技術も今後益々進歩するものと思いますが、一方でEVに適したトランスミッション(1段の減速比ではなく減速比可変機構の意)の利用によりさらに優れたシステムが構築できるものと考えます。
過去内燃機関自動車のドライブトレイン技術が燃費、走行性能の向上に果たしてきた役割はEVという新しい土俵においても同じではないでしょうか。