DRIVESIM解析事例 [ ホームへ ]
−ベクトル制御されたEV用誘導モータと永久磁石同期モータの特性比較−
・EVの誘導モータはベクトル制御されますがDRIVESIMは逆解析法を用いるため誘導モータのベクトル制御理論に基づく数学モデルを用いて順解析法により電圧、電流、トルクを
求めることは行わず逆にモータに要求されるトルクTと回転数Nから誘導モータの等価回路を用いて電圧や電流をフェーザ表示によるベクトル演算により求めるという手法を用います。
・一般に誘導モータの等価回路としては計算を簡素化するため励磁回路を電源側に移動させたL型等価回路が多く使用されますがEVのように低速、低トルク(電流)、低電圧での
駆動が頻繁な場合には1次側の抵抗やリアクタンスによる電圧降下が励磁回路や2次側の回路に及ぼす影響が大きいためL型回路による電流や電圧の計算精度は悪化します。
・DRIVESIMではT型回路モデルの1次側電圧降下を考慮して電流、電圧のフェーザ表示に基づくベクトル演算で電源電圧(V)と電流(I1)を求めます。制御方法は実際のモータの
ベクトル制御における「2次磁束一定制御」に相当する「滑り周波数制御」(滑り周波数/トルクの比率一定)もしくは「滑り率制御」(滑り率/トルク比率一定)のいずれかを選択できます。
・以上の等価回路はベクトル制御を行う誘導モータの定常運転(T,N一定)特性をよく表すものであり、したがってこのモデルは誘導モータの「準定常モデル」といえます。
・また要求される端子電圧Vが許容最大電圧Vmaxを超える場合はV=Vmax一定とするよう滑り周波数を補正します。これは永久磁石同期モータの界磁弱め制御に相当します。
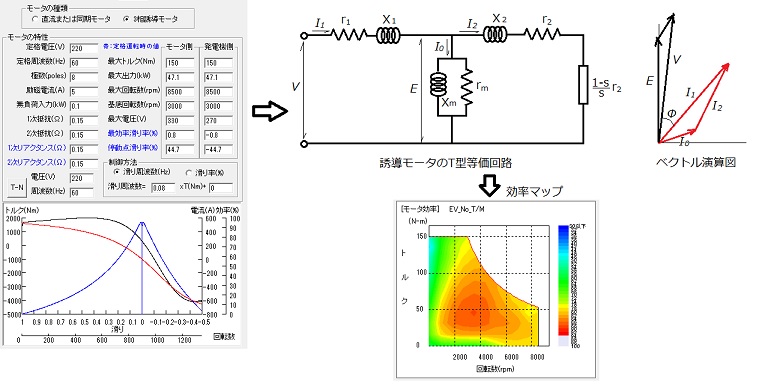
<誘導モータモデル>
・DRIVESIMによる永久磁石同期モータと誘導モータの性能特性を比較すると下図のように類似したものとなっていることがわかります。
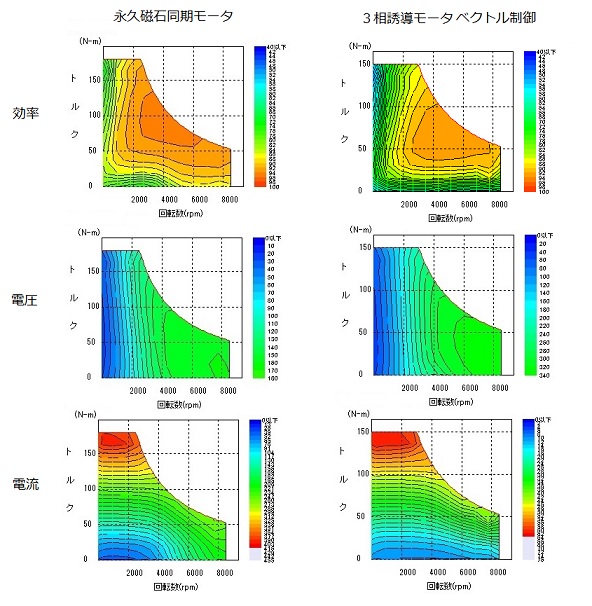
<DRIVESIMにおける誘導モータと永久磁石同期モータの性能特性比較>
・過渡状態まで含めた厳密なシミュレーションのためには誘導モータのベクトル制御理論に基づき磁束座標系で表した誘導モータの電圧電流ベクトル方程式とトルク方程式を
用いた演算が必要になりますがDRIVESIMのような逆解析手法では過渡現象を連続時間ではなく計算ステップ毎に離散化された定常現象の推移として扱うため
車両の急加減速のシミュレーションの場合を除き、モード走行シミュレーション(デフォルト計算時間ステップは1s)では上記「準定常モデル」の適用が可能と考えられます。