DroneV 5.0 To English Web Site
-Wha’s New @V5.0-
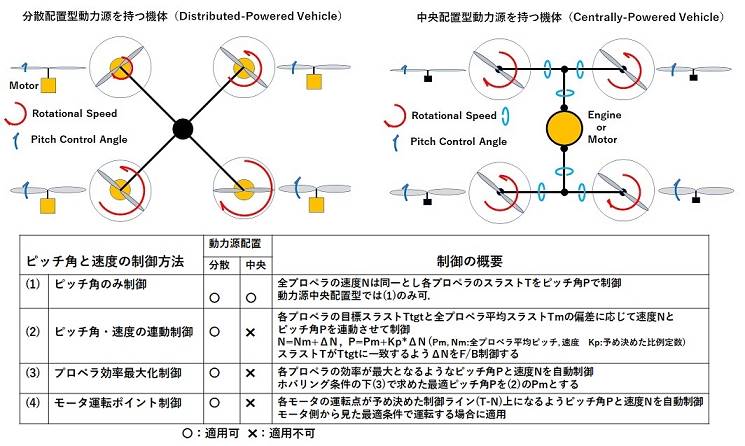
―マルチコプタではロータのチルト(傾斜)角を制御することにより機体の姿勢(ヨー、ピッチ、ロール)と並進速度(X,Y,Z)を独立して制御できる
『6自由度』マルチコプタが実現でき、現在ドローンで主流のロータ取り付け角固定タイプに対し飛行運動性能や耐墜落性能は飛躍的に向上します.
Ver.5.0ではチルト角可変タイプのマルチコプタの解析が可能となりました. 有人eVTOLの他、高性能マルチコプタの構想設計・基本性能予測に
DroneV 5.0を是非ご利用ください.―
DroneV5.0のYoutube動画はこちら
(1)DroneV5.0によるチルトロータ式マルチコプタの飛行姿勢の自由度と耐墜落性能の向上の予測
<解析事例:3基のロータが推力喪失の状態で水平姿勢を保って飛行するHexa-copterのシミュレーション>
(2)
DroneVのチルトロータモデル
1. チルト方式
◆1軸方式
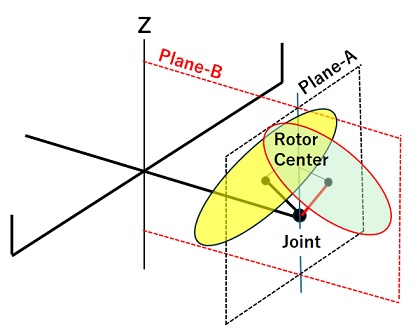
ロータ軸ジョイントにアクチュエータ1個を設け、ロータ軸をロータアームと直交する平面Plane-A内でTilt角γだけ回転させる方式Aと
Z軸とロータアームから形成される平面Plane-B内でPitch角βだけ回転させる方式Bが可能ですがTilt角可変化の方が飛行性能向上の
メリットが大きいため 方式Aを用います. 但しβは機体設計値として固定値で与えることができます.
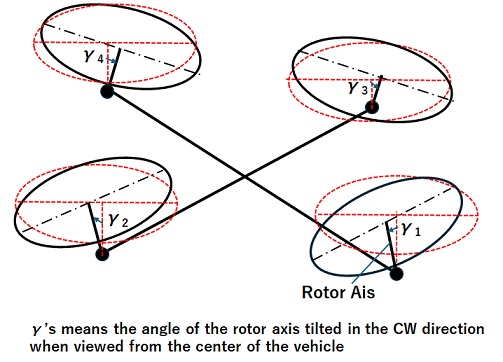
◆ 2軸方式
ロータ軸ジョイントにアクチュエータ2個を設け、Tilt角γとPitch角βを同時に制御するもので 飛行性能、耐墜落性ともに最も優れていますが、
機構と制御が複雑になります. DroneV5.0では2軸可変方式には対応していませんがγ、βは固定値としてロータ毎に入力値として与えることができます.
したがって一部eVTOLに採用されているロータの円錐上配置方式のモデル化とシミュレーションは可能です.

< 図はSkyDrive社 Web Contentsより引用 >
2) 力学計算アルゴリズム
固定ロータ式マルチコプタの入力パラメータはロータのスラストのみでありパラメータ数はロータ枚数に等しくなりますがチルトロータ式の場合は
ロータ毎にスラストとチルト角の2つのパラメータをもつのでパラメータ数はロータ数の2倍となりその決定プロセスとアルゴリズムが複雑になります.
・DroneVでは機体の静的平衡が保たれるようX,Y,Z方向の力のバランス、X,Y,Z軸廻りのモーメントのバランスの合計6つのバランス式に対しスラスト配分および
チルト角配分に関する6つのパラメータを独自のアルゴリズムにより決めます. したがってロータ数が3枚以上であればロータ数に関係なく決定するパラメータ数は6個一定です.
・一方 複数ロータの故障により稼働ロータが2枚の場合は2枚のロータのスラストとチルト角の合計4パラメータとなり最大4自由度の制御しかできません. この場合、
機体が回転せずに高度を保つことを目標に機体X,Y,Z軸廻りのモーメントと慣性系Z軸方向の力のバランスを保つための機体姿勢を得るよう4つのパラメータを決めます.
―過去のUpdate 履歴―
DroneVはドローンの航続距離、加速・最高速度などの飛行性能をシミュレーションするためのパッケージソフトです。
汎用の1DCAEツールではドローンの*システムレベルシミュレーションのために多くのオプション製品群を用いて作成した
サブモデルやモジュールを組み合わせてモデルを構築するのに対しDroneVはシステムレベルシミュレーションに必要な
機体モデル・飛行モード・ペイロードおよび風ファイルの作成から飛行結果出力までの機能が統合・パッケージ化されています.
*システムレベルシミュレーション:ドローンの機体・ロータやモータ・バッテリなどのパワーシステムの基本設計・容量検討と性能予測などを目的とするもの
Wha’s New @V4.3
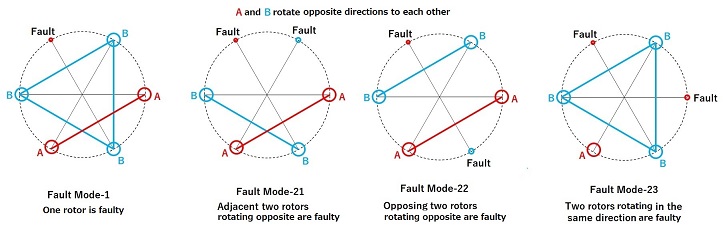
マルチロータ機の耐故障性解析 (Fault
Tolerance Analysis)
機能を拡充しました.
◆
任意のロータが推力を喪失した時に機体の姿勢を一定に保ってホバリングを継続するための残りのロータの推力やモータ回転数の再配分を予測します.
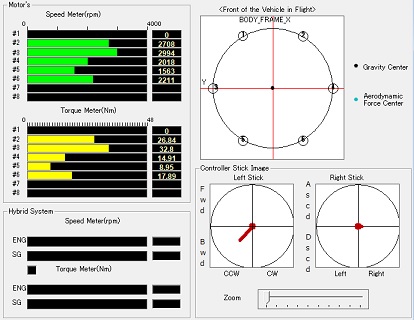
<Hexa-copter の#1ロータ 故障時の各モータ運転状態::重心は機体中心上>
◆
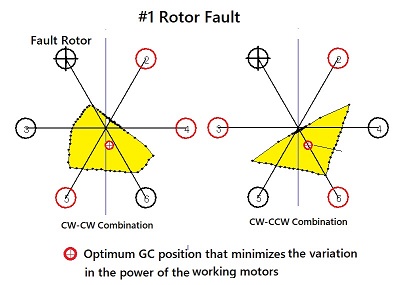
ホバリングを可能とするための機体重心位置の許容範囲 (Hoverability Margin)を求め, 各モータ出力のバラつきを最小にする重心位置を表示します.
◇Hexa-copter
(6Rotors)
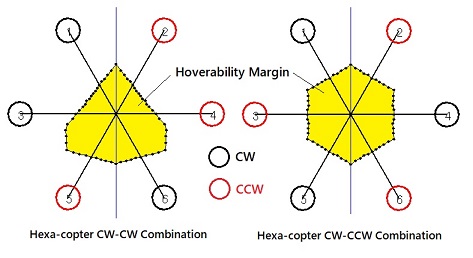
<6ロータ共故障なし>
<
#1 ロータ故障>
◇Dodeca-copter
(12Rotors)
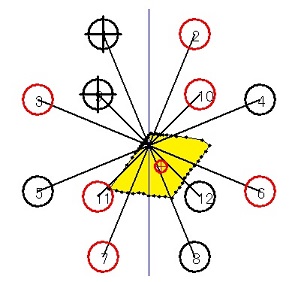
<#1, #9ロータ故障>
◆ ロータの数や配置、回転方向(CW-CCW)等の機体諸元や風向/風速や空気密度など大気条件がHoverability Margin に与える影響を調べることができます.
◇Hexa-copter 機首前方45°から7m/sの風
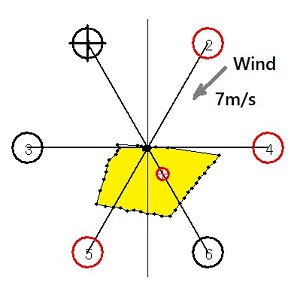
<Hexa-copter #1 ロータ故障>
有人eVTOLに採用されている同心2重円上にロータを配した機体の飛行シミュレーションが可能となりました.
Ver.4.1ではロータ数12と18の2タイプに対応しています.
◆
12ロータ
外円上に8、内円上に4と合計12基のロータを配しています. これは外円のOpto-copter、内円のQuad-copterを組み合わせた配置になっており、
Sky Drive社のSD-05機がこの方式を採用しています.
◆18ロータ
外円上に12、内円上に6と合計18基のロータを配しています. これは外円のDodeca-copter、内円のHexa-copterを組み合わせた配置になっており、
Volocopter社のVolocity機がこの方式を採用しています.
12ロータ配置 18ロータ配置
Sky Drive SD-05画像
Volo City画像
https://drone-journal.impress.co.jp/docs/event/1185642.html https://www.aviationwire.jp/archives/272430
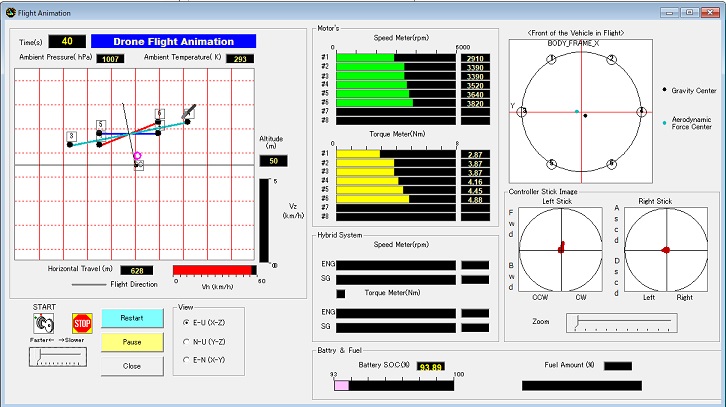
◆飛行シミュレーション
12ロータ機が上図の#2と#11の2枚のロータが故障・ストップした状態で80km/hで水平前進飛行している時の各モータの回転数、トルクの
分配を示しています. 飛行中2枚がストップしてもモータパワーの再配分により安定して飛行することが可能なことがわかります.
12枚のロータの回転方向CW-CCWの組み合わせを変えたらどうなるか? Hexa-copterやOcto-copterに比べ耐故障性 (Fault Tolerance)
は
どの程度向上するかなども調べることができます.
12枚機の飛行シミュレーションのアニメ
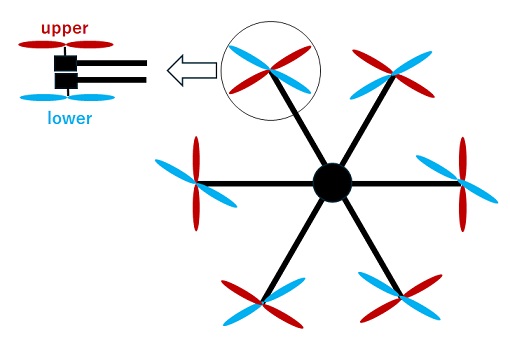
Ver.4.0では物資運搬配送用に大きなスラストを得るためロータを上下2段に配する2重反転ロータセット (Contra Rotating Rotor Set) を使用する
マルチコプタのシミュレーションが可能となりました. 各ロータセット毎の上下(Upper、Lower)ロータは各々独立したモータで駆動され機体の
Pitch、Roll、Yawの各姿勢、および高度を制御します.
2重反転ロータを用いるマルチコプタ
画像をクリックするとYoutube動画を視聴できます.
(1)
2重反転ロータのモデル化について
1.
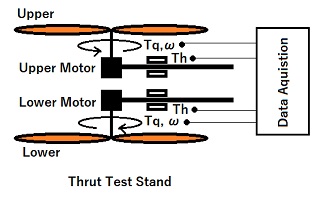
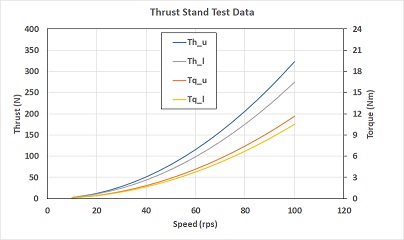
スラストスタンドによるデータ計測
市販もしくは内製のスラストスタンドを用いてロータ回転数に対する上下ロータのスラスト、駆動トルクを計測
スラストスタンド概念図 計測結果事例
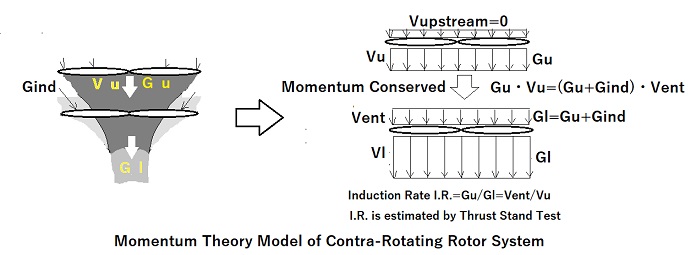
2. 運動量理論による2重反転ロータのモデル化
Excelに入力されたスラストスタンド試験データを読み込み2重反転ロータの空気力学モデルのパラメータを決定
2重反転ロータの1D-Momentum
Theory モデル
(2) 飛行中のロータ速度の制御
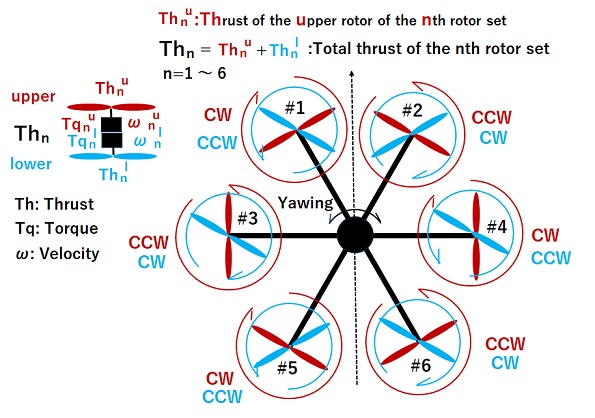
1. Pitch, Roll, 高度(速度)の制御
Yawingを除く機体の姿勢や高度(速度)の制御は各ロータセット間の上下ロータ合計スラストThnの相対差により行います.
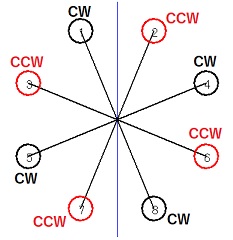
2重反転ロータをもつHexa-copter
(ロータ配列CW-CCW x 3)
2. Yawingの制御
従来、飛行機やヘリコプタの2重反転ロータ(プロペラ)使用の目的はロータ同士のトルク反力を打ち消すことですが同一ピッチ(逆)の2つのロータを
直列に配し等速で回転させると上下または前後のロータ間でスラストやトルクに差が生じるため可変ピッチ機構の使用が前提となっています.
一方ドローンでは軽量化や機構のシンプルさを追求して固定ピッチのロータが採用されますが、ロータ毎に独立したモータで速度制御が可能であり
Yawingトルクは上下ロータ速度の差動により制御できます.
制御量はYawing角速度またはYawingトルクであり操作量は上下ロータの回転速度差Δωになりますが、目標Yawingトルクがゼロの時に
◆速度差Δω=0とし個々の上下ロータセットでは反トルクはバランスしないものの機体全体ではバランスしている状態を基準とする速度ベース制御
◆トルク差Δtq=0とし個々のロータセットでトルクがバランスしている状態を基準とするトルクベース制御
◆スラスト差Δth=0とし個々のロータセットでスラストがバランスしている状態を基準とするスラストベース制御
のいずれかを使用するかにより各ロータの運転条件(速度、トルク)に差が生じます.
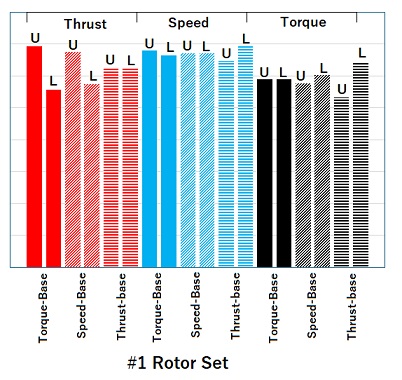
1. Yawing 制御法によるロータスラスト、回転数、トルクの比較
a) ホバリング
Hexa-copter モデルによるシミュレーション結果を示します. 下図a)はZ軸中心軸上に重心がある機体を無風環境下でホバリングさせた時の#1ロータセットの
運転データを示しています. 上下(U,L)ロータを比較すると速度ベース制御では上下速度が、トルクベース制御では上下トルクが、スラストベース制御では上下スラストが
各々同じになっていることがわかります.
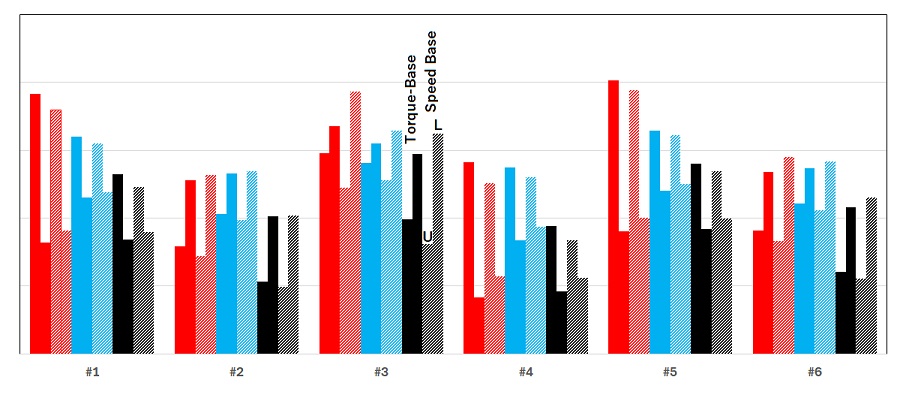
b) 前進飛行
下図b)は重心がZ軸から100mmだけオフセットした機体が水平前進飛行した際の#1~#6の運転データを速度ベース制御とトルクベース制御とで比較しています.
Pitch、Rollの飛行姿勢を保つため各ロータセットのスラスト分担に差が生じています. このとき各ロータに作用する*ドラグの不均衡や前傾した機体に作用する重力により
Yawingトルクが発生しますがこれを相殺するよう上下ロータを差動させています. 速度ベース制御、トルクベース制御で運転条件に差があることがわかります.
*ロータ回転面に平行で飛行方向とは逆向きに作用する抵抗力
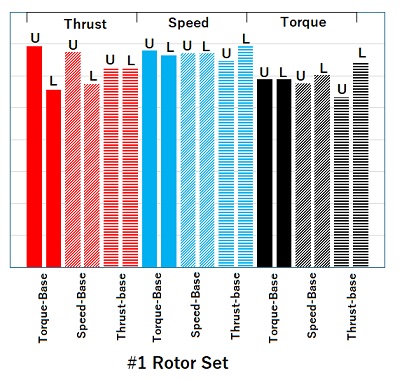
a) Yawing 制御法によるロータ運転条件の相違_Hovering
b) Yawing 制御法によるロータ運転条件の相違_Forward Flight
(3) 2重反転ロータとシングルロータの消費パワーの比較
同一諸元のロータを有する2重反転ロータQuad-copterとシングルロータOcto-copterの消費パワーの比較を下表に示します.
なお比較においてはモータやESCでの損失の影響をなくすため、電力消費に代えてロータが消費するパワーを表記してあります.
表よりホバリング、前進飛行ともに シングルロータの方が13~14%程消費パワーが少ない ことがわかります.
本事例のように、一般的にはロータ回転総面積が同じ場合、ロータ効率(N/kW)はシングルロータの方が大きくなります.
2重反転ロータの使用に際しては効率面からの検討が必要です.
<Comparison of Power between Contra Rotating and Single>
|
Vehicle
Type |
Num.
of Rotor |
Rotor
Dia. |
Differential
Control Method |
Hovering |
Forward
Flight(10m/s) |
|
Quad-copter |
(Dual)
x (4) =8 |
0.51m |
Speed Base |
5.853kW |
5.423kW |
|
Torque Base |
5.86kW |
5.454kW |
|||
|
Octo-copter |
(Single) x(8)=8 |
0.51m |
− |
5.084kW |
4.655kW |
(4) 2重反転ロータとシングルロータの耐故障性能の比較
1.シングルロータと2重反転ロータのHexa-Copter同士の比較
対向ロータの回転方向がCW-CCWの組み合わせをもつHexa-copterのいずれか1つのロータが故障しスラストを喪失すると残り5つのロータの
スラスト再配分を行っても一定の姿勢を保って安定飛行することができないことがわかっています.
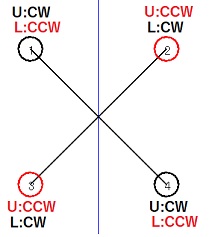
一方、同じく対向するUpperロータの回転方向がCW-CCWの組み合わせになっている2重反転ロータをもつHexa-copterがホバリング中にいずれか1つ
のロータが故障した時、スラスト再配分により一定の姿勢を保てるか調べてみます. 下図に示すとおり故障は#1ロータセットのUpperロータが故障した場合と
#1ロータセットのLowerロータが故障した場合の2ケースを想定します.
12枚全てのロータが正常に動作している場合、スラストは全て同じとなります. これに対しいずれかのロータが故障した場合は残りの11枚のロータの
スラストを再配分することにより水平姿勢を保つことができます. ただし#1のUpperとLowerはX,Y軸座標は同じですが回転方向が逆であり、残りのロータは
CW:CCWが6:5または5:6と同数ではないので, どちらが故障するかによってスラスト配分は異なります.
ロータ故障時のスラスト配分
2. 2重反転ロータのQuad-CopterとシングルロータのOcto-Copterの比較
このケースではロータの合計枚数はいずれも8枚になります. 下の表はホバリング中にいずれか1枚または2枚のロータが故障した場合に
スラストの再配分により水平姿勢を保てるか否かを判定したものでSは安全にホバリング可能、Fは不可を意味しています.
1枚のみ故障ならOcto-Copter, Quad-Copter共に故障ロータにかかわらず安全なホバリングが可能です.
2枚同時故障なら
◇
Octo-Copterはお互いに対向位置にない同方向に回転する2枚
(1-4,1-5,2-3,2-6) が故障するとホバリング不可となります.
◇
Quad-CopterはUpper同士(またはLower同士)の故障ならロータにかかわらずホバリング可能ですがいずれかのUpperと
いずれかのLower各1枚が故障ししかもそれらが同方向に回転するロータの場合ホバリング不可となります.
DroneVでは更に任意方向に飛行している場合や重心位置が機体中心からオフセットしていたり風を受けたりと様々なシチュエーションでの
耐故障性能の予測評価が可能です.
<Octo-Copter と2重反転ロータQuad-Copterの耐故障性能比較>
S:Safe F:Failure U:Upper L:Lower
YouTube動画
DroneV5.0の動画です.画像をクリックすると動画を視聴できます.

------------------------------------EVTOLのシミュレーション動画です. 画像をクリックしてください. 動画を視聴できます.-----------------------
------------------------------------------エンジン搭載ドローンのシミュレーション動画です.------------------------------------------------
画像をクリックするとYoutube動画を視聴できます. 画像をクリックするとYoutube動画を視聴できます. 画像をクリックするとYoutube動画を視聴できます.
画像をクリックするとYoutube動画を視聴できます. 画像をクリックするとYoutube動画を視聴できます.
その他の機能についてのプレゼンテーションはこちら
技術資料紹介
◆研究レポート: ハイブリッドドローンの飛行シミュレーション−送電線鉄塔点検用用途に利用可能なドローンコンセプト検討−
◆Technical
Report: High Power & Low
Emission Engine for Next Generation Hybrid Drone
◆2020年自動車技術会学術講演会におけるDroneVに関係する講演
◆YouTube
Movies 準備中
Web会議等による製品デモを行うこともできます. ご希望の場合はお問合せください。