�����ԁE���[�^�T�C�N���̑��s���\�E�R��V�~�����[�V�����\�t�g
DRIVESIM 12.1
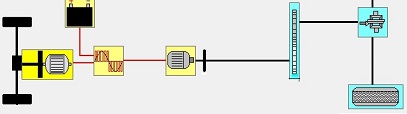
�����Ԃ̑��s���\��s�R���d����V�~�����[�V�������܂�.
�쓮�n��MT, AT�����CVT�i�x���g���A�V�����Ԏ��j�̊e�g�����X�~�b�V�����ɑΉ�
HEV(�n�C�u���b�h�J�[)��EV(�d�C������)�̐v�p�r�ɂ��œK�ł�.
�@�\�ڍׂ͂����炩����������������܂����@[��͎����] �@[��������]�@[DRIVESIM��̓��|�[�g_�n�C�u���b�h�����ɂ��R��E���s���\�̔�r]
Web��c���ɂ�鐻�i�f�����s�����Ƃ��ł��܂�. ����]�̏ꍇ�����⍇�����������B
What's New @Ver.12.1
EV�̗l�X�ȃh���C�u�g���C���i���͓`�B�j�@�\�̃V�~�����[�V������r���\�ł�.
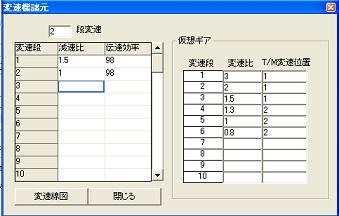
���݂̎s��EV�̑����̓��[�^�Ƌ쓮�֊ԂɁu�����@�i���x����j�v��z����쓮�������̗p���Ă���A�ꕔ��2�i�ϑ��@���̗p���Ă���ɂ����܂��A
����EV�̕��y���i�ݐ��\�������������Ȃ�Α��s���\�Ɠd��𗼗������邽�߁u�ϑ��@�v�͕s���ɂȂ���̂Ɨ\�z����܂�.
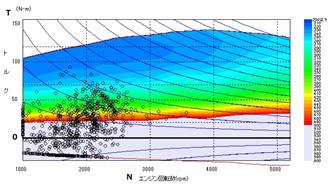
�@���ݎ����Ԃł͗l�X�ȋ@�\�̕ϑ��@���̗p����Ă��܂�����{�I�ɃG���W���p�ɊJ�����ꂽ���̂ł���ϑ��@���͎��̉�]������1�����A�����̓p���[��
��{�I��(+)�Ŏ�́i-�j�̈悪����݂̂ł���T-N���W��̉^�]�|�C���g�͑�1�ی��݂̂ƂȂ�܂�.
����ɑ����[�^��T-N���W���4�ی��S�Ăʼn^�]�\�ł���A����������EV�ł̓��[�^�̓��������������߂̗l�X�ȕϑ��@�@�\���l���邱�Ƃ��ł��܂�.
 �@�@
�@�@
�@�@�@
�G���W���^�]�\�̈�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�@�@���[�^�^�]�\�̈�
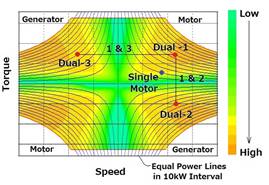
Ver.12.1�ł͂dV�̃h���C�u�g���C���E�ϑ��@�����ɂ�鑖�s���\��d��\�̃V�~�����[�V������r���\�ł�.
��1��
���[�^1��
(1)
�����@�i�ϑ��@�\�Ȃ��j �@�@�@�@�@ (2) ���i�ϑ��@
 �@�@�@�@�@�@
�@�@�@�@�@�@
��2�� ���[�^2��
�����͕����@�\����
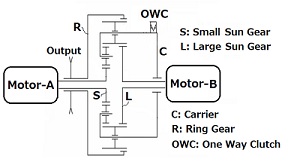
(3) �V������_�L�����A���o�� �@�@�@ (4) �V������_�����O�M�A���o�́@ �@�@ (5) ���i�ϑ��@
 �@�@�@
�@�@�@
���Q�n�����͕���
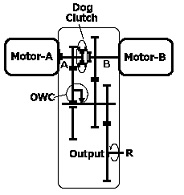
(6) �O��֕ʋ쓮
WLTC���[�h�d��v�Z����
|
�����ԍ� |
���[�^ �@ �� |
�쓮���� |
���s�d��
(km/kWh) |
�d����� �䗦(%) |
|
(1) |
1 |
�����@ |
10.21 |
�}0 (�) |
|
(6) |
2 |
�O��֕ʋ쓮 |
10.30 |
+0.8 |
|
(5) |
2 |
���i�ϑ��@ |
10.75 |
+5.3 |
���[�^2��F45kW
160Nm�@�@�@���[�^1��F90kW 320Nm
What's New @Ver.12.0
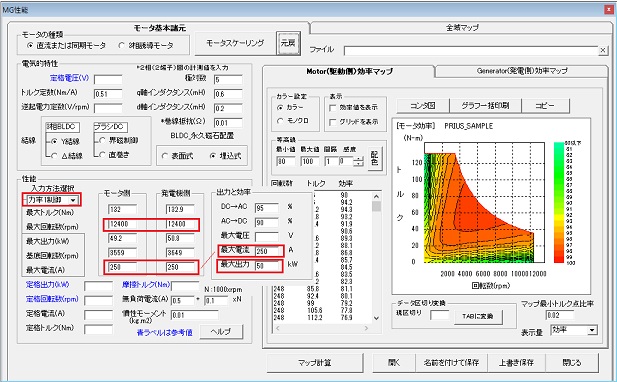
���i�v���Γ������[�^�iPMSM�j�̓S���Ɠ��������߂邽�ߓ����S����R������1D���[�^������H���f��(q-d���f��)���̗p���܂���.���@
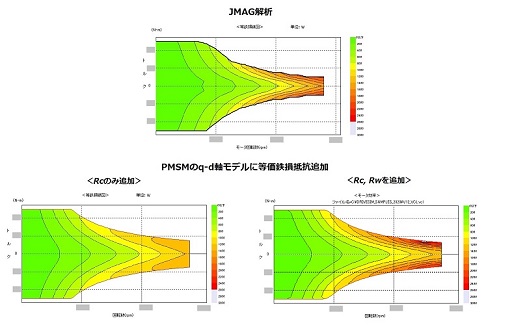
���������[�^�̊J���ɂ����Ă�JMAG���ɂ��3D��͂ɂ�蓺����S���̍ŏ������}���܂�������ꂽ���[�^�ɂ�鑖�s�d��̌���\���ɂ�DRIVESIM��
�ɂ��1D�ԗ����f���ɂ�鑖�s�V�~�����[�V�������K�v�ł�.�@
��DRIVESIM�]���o�[�W������
���s�V�~�����[�V�����ɂ�����3D�d����͂�����œ����S���⓺���̃}�b�v���g�p���邽�߁A��͑Ώۃ��[�^�ł������[�^�̏�����C���o�[�^���\�i�ő�d���E�d���j��
�ύX���ꂽ�ꍇ�̑�����d��ω��̗\���͂ł��܂���ł���
��DRIVESIM12.0��
���[�^�S�����uq-d���f���v�ɒlj����ꂽ�u*�����S����R�v���̓d�͑����ɒu�������܂�. �����S����R�ɂ͂������̃p�����[�^������3D��͂�����f�[�^�Ƃ�
��r�ɂ��L�����u���[�V�������K�v�ł������Y�p�����[�^�����܂�A����[�^�ɑ����[�^������C���o�[�^���\���ύX���ꂽ�ꍇ�̑�����d��̕ω����\���ł��܂�.
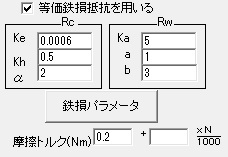
*�S����R�ɂ͓�����H�ɂ����ăC���_�N�^���XLq, Ld�ɑ�����ɒlj������Rc�ƁA������Ld, Ld�ɑ�����ɒlj������Rw������
�ZRc �͎�ɌŒ�q�i�X�e�[�^�j�̉Q�d����q�X�e���V�X���ɊW������̂őS��]�A�S����ɘj��S���̊�{�I���z�����߂܂�.
�ZRw �͎�ɍ�����]���E����ߓx�̋����^�]��ł̓S�����z������t���܂�.
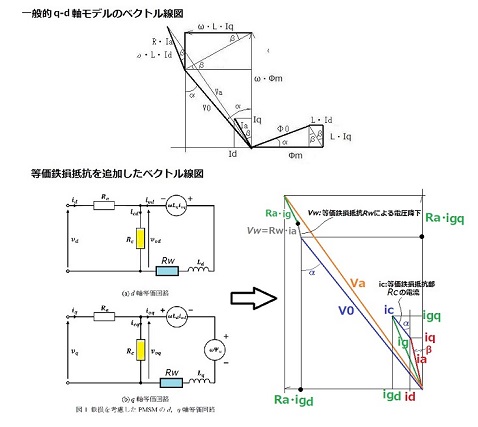
�@�@�@�@���S���v�Z�̂��߂̓����S����R���f���Ɠd���x�N�g���}��
<Rc, Rw�̃p�����[�^��
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���S���v�Z�၄
Rc,�@Rw�ɂ͊e�X�p�����[�^������AJMAG�v�Z�l������f�[�^�Ƃ̔�r�ɂ��p�����[�^�̍œK�����K�v�ƂȂ�܂���,�@���[�U��
Excel�ɓ��͂��ꂽ������S���}�b�v���������ł���A�p�����[�^�̎����œK�������s����Excel�}�N�����ʓr�p�ӂ���Ă��܂�.
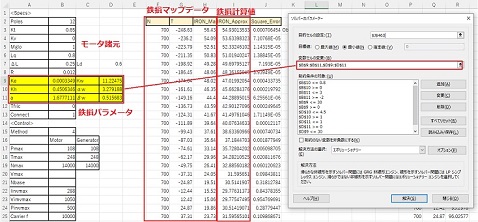
�@���S���p�����[�^�̍œK���̂��߂�Excel�}�N���iExcel Solver���p�j��
�����s���̓����E�S���̃f�[�^���o�͂ł��܂�.>
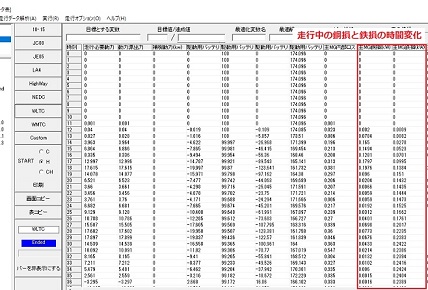 �@�@�@�@
�@�@�@�@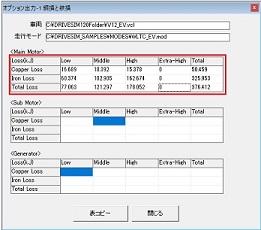
��WLTC_EV���[�h���s���̓����E�S���̎��ԕω����@�@�@�@�@�@�@�@�@��WLTC_EV���[�h���s�ɂ����铺���E�S���W�v��
What's New @Ver.11.�W
���H�̕W������z�����s�R��E�d��ɗ^����e�����\���ł��܂�.
What's New @Ver.11.7
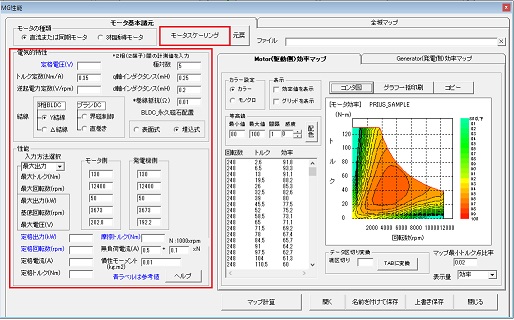
1) ���[�^�X�P�[�����O(Scaling)�@�\���lj�����܂���.�@�V�K���[�^���f���쐬���A�V�X�g���܂�!
���[�^�����@��d���E��̓c�[�����Ȃ��ꍇ�A�V���ȃ��[�^���f���쐬�ɂ͍�������܂�.�@�܂������ԃ��[�J��[�^�������[�J����
���\����Ă��鉽�炩�̎������烂�[�^�̏�����\�f�[�^������ł����Ƃ��Ă����Y���[�^�̍ő�o�͂�g���N����͑ΏۂƂ���ԗ��ɂ�
�}�b�`���Ă��Ȃ��ꍇ�̓��[�^�̃T�C�Y��ύX����K�v������܂�.
Ver.11.7�ł̓f�[�^����ς݂̎Q�ƃ}�V���i���[�^�j�ɑ����[�^���a�����{��KR����ю������̃T�C�Y�{��KA����ъ����^�[���{��KW
��3�̃X�P�[�����O�p�����[�^��^����Scaled�i�X�P�[���h�j�}�V���̓d�C�I������\��\�����V���ȃ��[�^���f�����쐬���邱�Ƃ��ł��܂�.
�@  �@
�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���Q�ƃ}�V���̏����ƌ����}�b�v�v�Z�l��
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��
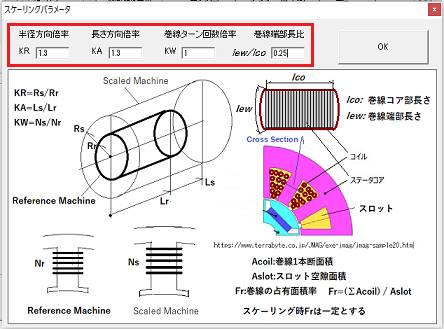
�@�@�@�@�@�@�@�@�@�@���X�P�[�����O�p�����[�^���́�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��
KR=1.3 KA=1.3 KW=1
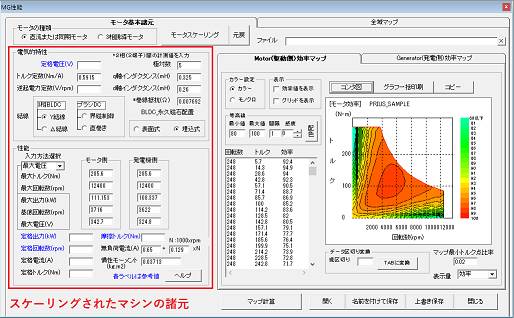
�@�@�@�@�@���X�P�[�����O���ꂽ�}�V���̏����ƌ����}�b�v�v�Z�l��
2) PMSM(�i�v���Γ������[�^)���\���͕��@�I�v�V�����̒lj�
���o�[�W�����ł�PMSM�̐���̓f�t�H���g�Ƃ��Ĉȉ��̐�����s���Ă��܂���
�ESPMSM(�\�ʎ���)��d���d���[������
�EIPMSM(��������)�͍ő�g���N����
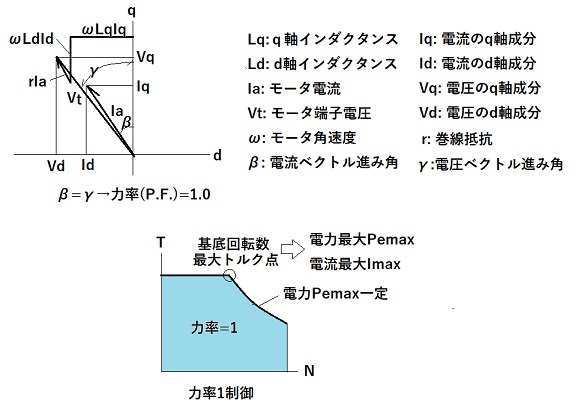
�Ƃ����Y����ł͍ő�d������ꍇ�͓d�����ő�d���Ƃ�����d���d���ɂ��E����ߐ�����s���o�͈͂��.
����ɑ�Ver.11.7�ł̓C���o�[�^���d�͕ϊ��V�X�e���̐��\�Ɗ֘A�t�����w�͗�1����x �����
�d���Ɠd���̐������Ń��[�^�o�͂��ő�ɂ���wVCLMT����x���I���\�ƂȂ�܂���.
(1) �͗�1����
�͗�1����ł͖����d�͂��[���ł���v���쓮���\�ɑ��鋟���瑊�d��(�d��x�d��)���ŏ��ƂȂ�܂�.�@
���������ă��[�^�쓮�ɕK�v�ȃC���o�[�^���̓d�͕ϊ��V�X�e���̗e�ʂ��ŏ����ł��܂�.
SPMSM�AIPMSM�̂�����̃^�C�v�ɂ��K�p�\�ł�.
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���͗�1����ɂ�����x�N�g�����}��
�C���o�[�^�̍ő�d�͂ƍő�d�����ǂݍ��܂�͗�1���䎞�̃��[�^���\�A�����}�b�v���쐬����܂�.
�@�@�@�@�@�@�@�@�@�@�@�@�@�@���͗�1����I�v�V�����I�����̃��[�^���͉�ʁ�
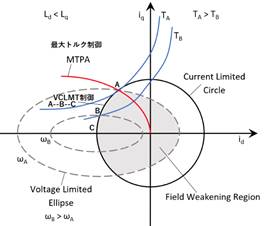
(2) VCLMT(Voltage and Current Limited
Maximum Torque)����
�C���o�[�^�̍ő�d���ƍő�d���ɂ�胂�[�^�d���Ɠd�������������ꍇ�Ƀ��[�^�o�͂��ő�ɐ��䂷�邱�Ƃ��ł��܂�.�@
�ᑬ�ł͍ő�g���N����(MTPA)���s���d���l���ő�A�d���l���ő�ƂȂ����_A������]���Ƃ�
�d���A�d���Ƃ��ő�l�ɌŒ�ێ������܂܉�]�����グ�Ă����܂�. (���}A-B-C)
VCLMT�̏����]���͉����ɂ�苁�܂�܂�.
��= | (Vmax
/ Ld) / (Kt / Ld-Imax)
| �ցF���[�^�p���x,�@Vmax:�ő�d��,�@Imax:�ő�d��,�@Kt:�g���N�萔, Ld:�����C���_�N�^���X
VCLMT�͊���]����荂����Ń��[�^�o�͂�傫���ł��܂�.�@�܂�SPMSM�AIPMSM���ɓK�p�ł��܂�.
https://jp.mathworks.com/help/mcb/gs/field-weakening-control-mtpa-pmsm.html
What's New @Ver.11.6�@ [�v���[���e�[�V�����̃_�E�����[�h]
�E�C���o�[�^�̌����}�b�v�����[�^�����}�b�v�ƕ����Ďg�p���邱�Ƃ��ł��܂�.
���[�^�x���`������HILS�ɂ���ċ��߂��C���o�[�^���j�b�g�̌����f�[�^�@���}�b�v�Ƃ��č쐬���Ă���DRIVESIM�̃V�~�����[�V�����Ɏg�p�ł��܂�.
�o�b�e����[�^�̍��d�����ɔ����C���o�[�^�������ጸ�̂��߂�DC Link�d���̐�����@���̑��̌����ɍœK�ł�.
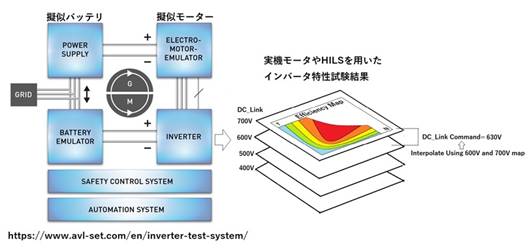
��HILS�ɂ��C���o�[�^�����}�b�v��
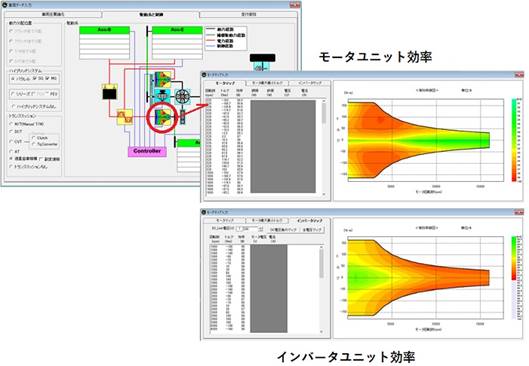
�@�@�@�@��DRIVESIM�̎ԗ��������͉�ʂɂ���������}�b�v���́�
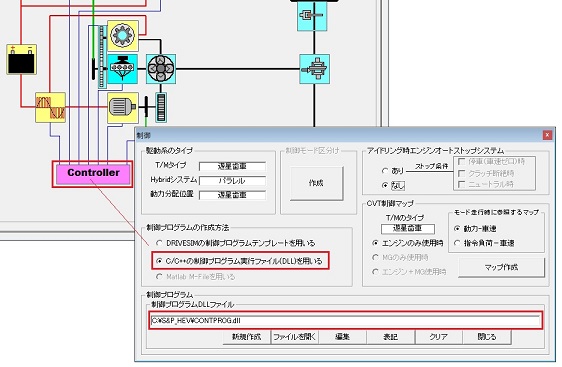
�쓮�n����v���O������C/C++��p���č쐬���ꂽ(.dll)�t�@�C����I���ł���悤�ɂȂ�܂����B
�V�����ԓ��͕����@�\�iTHS�����j�ɕϑ��@��g�ݍ��킹���쓮�n�̃V�~�����[�V�������\�ɂȂ�܂����B
What's New @Ver.11.3
�n�C�u���b�h�V�X�e���𓋍ڂ��錚�݁E��Ɨp�ԗ��̍�ƕ��ׂ�^���ăG���W����[�^�̓�����V�~�����[�V�������܂��B
��ƕ��ׂ͓��͌��i�G���W���܂��̓��[�^�j�̏o�͎���]���ƐÓI���׃g���N�̃e�[�u���A����ѓ����������[�����g�œ��́B�@�ÓI���ׂƊ����͂���u�Ԃ̓��I���׃g���N�E���͂����߂܂��B
�t��͂�p���Ă���̂ŋ͂��ȍs���̐���w�߂��L�q���邾���Ń��[�^�ɂ��G���W���A�V�X�g�^�]�A�����u���[�L�ɂ��d�͉�@�B�E�����u���[�L�̓��͋z�����V�~�����[�V�����\�ł��B
�@
What's New @Ver.11.2
�i1�j �쓮�p���[�^��Sweet Spot���z�\���@�\
EV�Ƀg�����X�~�b�V������K�p����ہA�œK�ϑ���̌����Ƀ��[�^�̍ő�����_(Sweet Spot)���z���͏d�v�ƂȂ�܂��B
Ver.11.2�ł̓��[�^�������烂�[�^�̌������z�R���^�}��\������ƂƂ��ɁASweet Spot��\�����܂��B
Sweet Spot�͈�蓮�͉��ł̃��[�^�ő�����_����̒ቺ�����e�l�͈͓��ɂ���^�]�|�C���g�̃o���h���Ӗ����܂��B
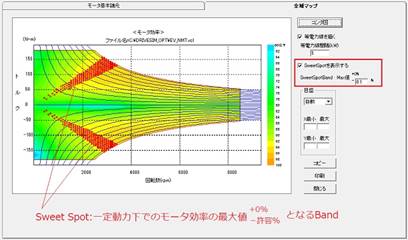
�@�@�@�@�@�@�@�������[�^(BLDC)��Sweet Spot���z
(2) �U���i�C���_�N�V�����j���[�^ ���f���̉���
EV�p�쓮���[�^�͓��{�������[�J�ł͎�ɉi�v���Γ������[�^(PMSM)���p�����܂����APMSM�̓��A�A�[�X����p���邽�߃R�X�g���������Ƃ⍂����ŊE����ߐ�����s�����߂�
�������ቺ����Ȃǂ̖�肪����A�C�OEV���[�J��G���W���Ԃ���̃R���o�[�gEV�ł͌��S�ŃR�X�g���Ⴍ������ł̌����ŗL���ȗU�����[�^���p�����邱�Ƃ������Ȃ��Ă��܂��B
DRIVESIM�̋����o�[�W�����ł͗U�����[�^�p�̊ȈՃ��f����p�ӂ��Ă��܂������A�v�Z���x�����コ���邽�߃��[�^���f���ɉ��ǂ��s���܂����B
�����ǃ��f���̊T�v��
�EEV�̗U�����[�^�̓x�N�g�����䂳��܂���DRIVESIM�͋t��͖@��p���邽�ߗU�����[�^�̃x�N�g�����䗝�_�Ɋ�Â����w���f����p���ď���͖@�ɂ��d���A�d���A�g���N�����߂邱�Ƃ͍s�킸
�t�Ƀ��[�^�ɗv�������g���NT�Ɖ�]��N����U�����[�^�̓�����H��p���ēd����d�����t�F�[�U�\���ɂ��x�N�g�����Z�ɂ�苁�߂�Ƃ�����@��p���܂��B
�E��ʂɗU�����[�^�̓�����H�Ƃ��Ă͌v�Z���ȑf�����邽�ߗ㎥��H��d�����Ɉړ�������L�^������H�������g�p����܂���EV�̂悤�ɒᑬ�A��g���N�i�d���j�A��d���ł�
�쓮���p�ɂȏꍇ�ɂ�1�����̒�R��A�N�^���X�ɂ��d���~�����㎥��H��Q�����̉�H�ɋy�ڂ��e�����傫������L�^��H�ɂ��d����d���̌v�Z���x�͈������܂��B
�EVer.11.2�ł�T�^��H���f����1�����d���~�����l�����ēd���A�d���̃t�F�[�U�\���Ɋ�Â��x�N�g�����Z�œd���d��(V)�Ɠd��(I1)�����߂܂��B������@�͎��ۂ̃��[�^��
�x�N�g������ɂ�����u�Q��������萧��v�ɑ�������u������g������v(������g��/�g���N�̔䗦���)�������́u���藦����v(���藦/�g���N�䗦���)�̂����ꂩ��I���ł��܂��B
�E�ȏ�̓�����H�̓x�N�g��������s���U�����[�^�̒��^�]�iT,N���j�������悭�\�����̂ł���A���������Ă��̃��f���͗U�����[�^�́u����탂�f���v�Ƃ����܂��B
�E�܂��v�������[�q�d��V�����e�ő�d��Vmax����ꍇ��V=Vmax���Ƃ���悤������g�������܂��B����͉i�v���Γ������[�^�̊E����ߐ���ɑ������܂��B
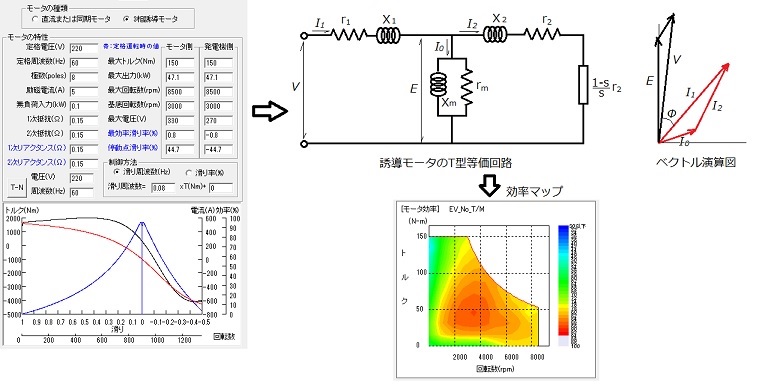
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���U�����[�^���f����
�E�ߓn��Ԃ܂Ŋ܂߂������ȃV�~�����[�V�����̂��߂ɂ͗U�����[�^�̃x�N�g�����䗝�_�Ɋ�Â��������W�n�ŕ\�����U�����[�^�̓d���d���x�N�g���������ƃg���N��������
�p�������Z���K�v�ɂȂ�܂���DRIVESIM�̂悤�ȋt��͎�@�ł͉ߓn���ۂ�A�����Ԃł͂Ȃ��v�Z�X�e�b�v���ɗ��U�����ꂽ��팻�ۂ̐��ڂƂ��Ĉ������ߎԗ���
�}�������̃V�~�����[�V�����̏ꍇ�������A���[�h���s�V�~�����[�V�����i�f�t�H���g�v�Z���ԃX�e�b�v��1s�j�ł͏�L�u����탂�f���v�̓K�p���\�ƂȂ�܂��B
�E���̂悤�ɕ��G�ȃx�N�g������v�Z�Ȃ����ėU�����[�^�𓋍ڂ���EV�̑��s�V�~�����[�V�������\�ƂȂ�̂��t��̗͂��_�ƂȂ�܂��B
�E�U�����[�^�̃x�N�g������̓����͗U�����[�^����������DC���[�^�̂悤�ɐ���ł��邱�Ƃł���Ɛ�������Ă��܂���DRIVESIM�Ōv�Z�����U�����[�^�Ɖi�v���Γ������[�^�̓�����r
�ɂ�肻�̂��Ƃ��m�F�ł��܂��B
(3) �o�b�e�����f������
������R�݂̂̊�{���f����CR��H���f���̂��Âꂩ��I���ł���悤�ɂȂ�܂����B
What's New @Ver.11.1
1. �쓮�n�@�\�̑I�����lj�
�@�V�����ԋ@�\��OWC�iOne way Clutch�j�̗L���̑I����lj����܂����B
2. ���s���\�v�Z�@�\�̉���
���쓮�n�\���ɂ�葖�s���\���}�E���i�����E�ǂ����������Ƃ�HEV���s�EEV���s�E�G���W�����s�̂R�^�]���[�h��I���ł��܂��B
��SG��L����p������HEV�̏ꍇ�ASG�����[�^�Ƃ��ăG���W���w�ォ��p���[�A�V�X�g����P�[�X���v�Z�ł��܂��B
�@�G���W�����}�b�v�ł̍Œ�^�]��]���ȏ�ʼn�]���Ă���ꍇ�̂݃A�V�X�g���܂��B
3. �G���W���R��}�b�v�����쐬�@�\�̉���
���G���W���A���[�^�̃}�b�v�f�[�^���Ȃ��Ƃ������R�Ŏԗ��v�����g���f���쐬��f�O�����P�[�X�𑽂��������܂��B
DRIVESIM�ł͉�͑ΏێԎ�̃G���W���R��}�b�v������ł��Ȃ��ꍇ�ł����[�J�J�^���O�ɂ���G���W����{�f�[�^��S�J�o�́i�g���N�j�J�[�u������
�ԗ��v�����g���f���p�Ƃ��Ă̊�{�I�}�b�v��DRIVESIM��ō쐬���邱�Ƃ��ł��܂��B�@Ver.11.1�ł͈ȉ��̇@�A�A�̎菇�ɂ��
�S��X�g�C�L��R�����{�Ƃ��R������_�����̈��EGR��VVT������s���Ƃ����ŋߎ嗬�̃K�\�����G���W���̔R��}�b�v���쐬���邱�Ƃ��ł��܂��B
�@�S��X�g�C�L�Ƃ����R��}�b�v�������쐬
�A�@�@�̃}�b�v���x�[�X�ɓ���^�]��̔R��ጸ����EASOM�fs FUNCTION�ŗ^����
���G���W�����l�A���[�^�̌����}�b�v������ł��Ȃ��ꍇ�̓��[�^�̍ő�g���N�A�o�́A��]���Ȃǂ̐��\�f�[�^�̑��A�d�C�I��������������̍��ڂ�
�ւ���f�[�^�����[�J�J�^���O�A���[�J�Z�p��A�܂��͌��\�_���������������ł���Ό����}�b�v���쐬���邱�Ƃ��ł��܂��B
What's New @Ver.11.0
1. �쓮�n�`�Ԃ̑I�����lj�
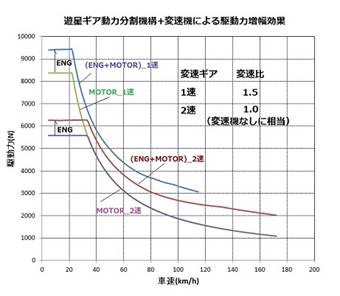
�쓮�n��1�̃v���l�^���M�A�����͕����@�\������THS�V�X�e���ɉ���
2�̃v���l�^���M�A�����͕����@�\������GM_VOLTEC-�U�V�X�e�����I���ł��܂�.
2. ���x�ˑ����R�[���h�X�^�[�g�����̐ݒ�
�@ �g�@���ɑ���R�[���h�X�^�[�g���̔R�����ʕ�A�G���W�����X�A�쓮�n�`�B�����A�o�b�e��������R�A�]�����R���̔䗦�����x�̊��ŗ^���邱�Ƃ��ł��܂�.
�@�����C�Z���X��
���m�[�h���b�N(NL)���C�Z���X�i�N�ԁA����j
�@�o�^���ꂽHDD�V���A��������PC�Ŏg�p�ł��܂��B�@���C�Z���X��V���A�����X�V���邱�Ƃ͉\�ł܂��X�V�ɐ����͂���܂���B
�@�V���A���ύX�͐\�����邱�ƂȂ����[�U�����g�ōs�����Ƃ��ł��܂��B
���t���[�e�B���O���C�Z���X�i�N�ԁA����j
�@�s����̕�����PC�ɃC���X�g�[���ł��܂������C�u�L�[(USB�X�e�B�b�N����)����������PC�ł̂N���ł��܂��B
[�z�[����] �@ [��͎����] �@[��������]